快速上手
模型 benchmark
AXCL 安装完毕后,模型跑分的工具 axcl_run_model 就可以使用了。该工具参数较多,可以用 axcl_run_model --help 查看可用的参数;如果对其实现机制感兴趣,还可以检查对应的 sample 目录中的源码。该工具和其他 cv & llm sample 一起,是源码形式提供的,以便于用户理解 API 的用法。
以测试一个模型的运行速度为例,使用 axcl_run_model -m your_model.axmodel -r 100 这样的形式 -m 指定要跑的模型,-r 指定重复次数,即可简单的跑测模型的速度。
/root # axcl_run_model -m yolov5s.axmodel -r 100
Run AxModel:
model: /opt/data/npu/models/yolov5s.axmodel
type: 1 Core
vnpu: Disable
warmup: 1
repeat: 100
batch: { auto: 1 }
axclrt ver: 1.0.0
pulsar2 ver: 1.2-patch2 7e6b2b5f
tool ver: 0.0.1
cmm size: 12730188 Bytes
---------------------------------------------------------------------------
min = 7.793 ms max = 7.929 ms avg = 7.804 ms median = 7.799 ms
5% = 7.796 ms 90% = 7.808 ms 95% = 7.832 ms 99% = 7.929 ms
---------------------------------------------------------------------------
从以上运行示例可见,从运行结果看,除了能指示模型运行时间外,还能指示工具链版本、模型类型等信息。
CV 示例
分类模型
分类模型的示例代码含完整注释如下:
#include "common/args.hpp" // 包含分割令行参数的头文件
#include "common/types.hpp" // 包含常用类型定义的头文件
#include "common/sampler.hpp" // 包含图像预处理的头文件
#include "common/topk.hpp" // 包含获取 Top K 类别的函数
#include "common/imagenet.hpp" // 包含 ImageNet 数据集的类别定义
#include "utilities/timer.hpp" // 包含计时器类
#include "utilities/file.hpp" // 包含文件操作的工具函数
#include "utilities/scalar_guard.hpp" // 包含资源管理类,确保资源的释放
#include "utilities/vector_guard.hpp" // 包含动态数组的资源管理类
#include <axcl.h> // AXCL API 头文件
#include <cmdline.h> // 命令行解析库
#include <opencv2/opencv.hpp> // OpenCV 图像处理库
// 设置默认配置文件路径
constexpr char DEFAULT_CONFIG[] = "/usr/local/axcl/axcl.json";
// 设置默认输入图像的高度和宽度
constexpr int DEFAULT_IMG_H = 224;
constexpr int DEFAULT_IMG_W = 224;
// 设置默认循环次数
constexpr int DEFAULT_LOOP_COUNT = 1;
// 设置默认 Top K 值
constexpr int DEFAULT_TOP_K = 5;
int main(int argc, char* argv[]) {
cmdline::parser cmd; // 创建命令行解析器
// 添加命令行参数
cmd.add<std::string>("config", 'c', "config file: axcl.json", false, DEFAULT_CONFIG); // 配置文件路径
cmd.add<int>("device", 'd', "device index (if multi-card available)", false, 0, cmdline::range(0, 3)); // 设备索引
#if defined(ENV_CHIP_SERIES_MC50)
cmd.add<int>("kind", 'k', "visual npu kind", false, 0, cmdline::range(0, 3)); // NPU 类型
#endif
#if defined(ENV_CHIP_SERIES_MC20E)
cmd.add<int>("kind", 'k', "visual npu enable flag", false, 0, cmdline::range(0, 1)); // NPU 启用标志
#endif
cmd.add<std::string>("model", 'm', "model file(a.k.a. .axmodel)", true, ""); // 必填参数,模型文件
cmd.add<std::string>("image", 'i', "image file", true, ""); // 必填参数,图像文件
cmd.add<std::string>("size", 'g', "input_h,input_w", false, std::to_string(DEFAULT_IMG_H) + "," + std::to_string(DEFAULT_IMG_W)); // 输入图像大小
cmd.add("swap-rb", 's', "swap rgb(bgr) to bgr(rgb)"); // 可选参数,是否交换颜色通道
cmd.add<int>("topk", 't', "top k values", false, DEFAULT_TOP_K, cmdline::range(1, static_cast<int>(std::size(IMAGENET_CLASSES)))); // Top K 值
cmd.add<int>("repeat", 'r', "repeat count", false, DEFAULT_LOOP_COUNT, cmdline::range(1, std::numeric_limits<int>::max())); // 重复次数
cmd.parse_check(argc, argv); // 解析命令行参数并进行检查
// 0-0. 检查配置文件
if (const auto config = cmd.get<std::string>("config");
cmd.exist("config") && (!utilities::exists(config) || !utilities::is_regular_file(config))) {
fprintf(stderr, "Config file %s is not exist, please check it.\n", config.c_str()); // 输出错误信息
return -1; // 退出程序
}
// 0-1. 检查模型和图像文件是否存在
const auto model_file = cmd.get<std::string>("model");
const auto image_file = cmd.get<std::string>("image");
if (const auto model_file_flag = utilities::exists(model_file), image_file_flag = utilities::exists(image_file);
!model_file_flag | !image_file_flag) {
auto show_error = [](const std::string& kind, const std::string& value) {
fprintf(stderr, "Input file %s(%s) is not exist, please check it.\n", kind.c_str(), value.c_str());
};
if (!model_file_flag) { show_error("model", model_file); } // 输出模型文件不存在的错误
if (!image_file_flag) { show_error("image", image_file); } // 输出图像文件不存在的错误
return -1; // 退出程序
}
// 0-2. 获取输入图像大小
std::array<int, 2> input_size = {DEFAULT_IMG_H, DEFAULT_IMG_W}; {
auto input_size_string = cmd.get<std::string>("size");
if (auto input_size_flag = common::parse_args(input_size_string, input_size); !input_size_flag) {
auto show_error = [](const std::string& kind, const std::string& value) {
fprintf(stderr, "Input %s(%s) is not allowed, please check it.\n", kind.c_str(), value.c_str());
};
show_error("size", input_size_string); // 输出输入大小错误
return -1; // 退出程序
}
}
// 0-3. 获取重复次数
auto repeat = cmd.get<int>("repeat");
// 1-0. 获取设备索引
const auto device_index = static_cast<uint32_t>(cmd.get<int>("device"));
// 1-1 初始化 AXCL,使用 scalar_guard 确保资源最终释放
fprintf(stdout, "axcl initializing...\n");
auto env_guard = utilities::scalar_guard<int32_t>(
axclInit(cmd.exist("config") ? cmd.get<std::string>("config").c_str() : nullptr), // 初始化 AXCL
[](const int32_t& code) {
if (0 == code) {
std::ignore = axclFinalize(); // 确保在初始化失败时调用清理
}
}
);
// 1-2. 检查初始化结果
if (const int ret = env_guard.get(); 0 != ret) {
fprintf(stderr, "Init axcl failed{0x%08X}.\n", ret); // 输出初始化失败的信息
return false; // 退出程序
}
fprintf(stdout, "axcl inited.\n");
// 1-3. 获取设备列表
axclrtDeviceList lst;
if (const auto ret = axclrtGetDeviceList(&lst); 0 != ret || 0 == lst.num) {
fprintf(stderr,
"Get axcl device failed{0x%08X}, find total %d device.\n", ret, lst.num); // 输出获取设备失败的信息
return false; // 退出程序
}
// 1-4. 检查设备索引
if (device_index >= lst.num) {
fprintf(stderr,
"Specified device index{%u} is out of range{total %d}.\n", device_index, lst.num); // 输出设备索引超出范围的信息
return false; // 退出程序
}
// 1-5. 设置设备
if (const auto ret = axclrtSetDevice(lst.devices[device_index]); 0 != ret) {
fprintf(stderr, "Set axcl device as index{%u} failed{0x%08X}.\n", device_index, ret); // 输出设置设备失败的信息
return false; // 退出程序
}
fprintf(stdout,"Select axcl device{index: %u} as {%d}.\n", device_index, lst.devices[device_index]);
// 1-6. 初始化 NPU
const int kind = cmd.get<int>("kind"); // 获取 NPU 类型
if (const int ret = axclrtEngineInit(static_cast<axclrtEngineVNpuKind>(kind)); 0 != ret) {
fprintf(stderr, "Init axclrt Engine as kind{%s} failed{0x%08X}.\n", common::get_visual_mode_string(kind).c_str(), ret); // 输出初始化 NPU 失败的信息
return false; // 退出程序
}
fprintf(stdout, "axclrt Engine inited.\n");
// 1-7. 打印参数信息
fprintf(stdout, "--------------------------------------\n");
fprintf(stdout, "model file : %s\n", model_file.c_str());
fprintf(stdout, "image file : %s\n", image_file.c_str());
fprintf(stdout, "img height : %d\n", input_size[0]);
fprintf(stdout, "img width : %d\n", input_size[1]);
fprintf(stdout, "--------------------------------------\n");
// 2-1. 加载模型
auto m = utilities::scalar_guard<uint64_t>(
[&model_file]() {
if (uint64_t id; 0 == axclrtEngineLoadFromFile(model_file.c_str(), &id)) { // 从文件加载模型
return id; // 返回模型 ID
}
fprintf(stderr, "Create model{%s} handle failed.\n", model_file.c_str());
return uint64_t{0}; // 返回 0 表示失败
},
[](const uint64_t& id) {
if (uint64_t{0} != id) {
std::ignore = axclrtEngineUnload(id); // 卸载模型
}
}
);
// 2-2. 创建上下文
uint64_t ctx = 0;
if (const auto ret = axclrtEngineCreateContext(m.get(), &ctx); 0 != ret) {
fprintf(stderr, "Create model{%s} context failed.\n", model_file.c_str()); // 输出创建上下文失败的信息
return false; // 退出程序
}
// 2-3. 获取 IO 信息
auto info = utilities::scalar_guard<axclrtEngineIOInfo>(
[&m]() {
axclrtEngineIOInfo i;
if (0 == axclrtEngineGetIOInfo(m.get(), &i)) {
return i; // 返回 IO 信息
}
fprintf(stderr, "Get model io info failed.\n");
return axclrtEngineIOInfo{}; // 返回空结构体表示失败
},
[](const axclrtEngineIOInfo& i) {
std::ignore = axclrtEngineDestroyIOInfo(i); // 释放 IO 信息
}
);
// 2-4. 创建 IO
auto io = utilities::scalar_guard<axclrtEngineIO>(
[&info]() {
axclrtEngineIO i;
if (0 == axclrtEngineCreateIO(info.get(), &i)) {
return i; // 返回创建的 IO
}
fprintf(stderr, "Create model io failed.\n");
return axclrtEngineIO{}; // 返回空结构体表示失败
},
[](const axclrtEngineIO& i) {
std::ignore = axclrtEngineDestroyIO(i); // 释放 IO
}
);
// 2-5. 获取输入数量
uint32_t input_count = 0;
if (input_count = axclrtEngineGetNumInputs(info.get()); 0 == input_count) {
fprintf(stderr, "Get model input count failed.\n"); // 输出获取输入数量失败的信息
return false; // 退出程序
}
// 2-6. 获取输入大小
std::vector<uint32_t> inputs_size(input_count, 0);
for (uint32_t i = 0; i < input_count; i++) {
inputs_size[i] = axclrtEngineGetInputSizeByIndex(info.get(), 0, i); // 获取每个输入的大小
}
// 2-7. 分配输入内存
auto inputs = utilities::vector_guard<void*>(
[&input_count, &inputs_size]() {
std::vector<void*> ptrs(input_count, nullptr);
for (uint32_t i = 0; i < input_count; i++) {
if (const auto ret = axclrtMalloc(&ptrs[i], inputs_size[i], axclrtMemMallocPolicy{}); 0 != ret) {
fprintf(stderr, "Memory allocation for input tensor{index: %d} failed{0x%08X}.\n", i, ret); // 输出内存分配失败的信息
}
}
return ptrs; // 返回分配的内存指针数组
},
[](void* ptr) {
if (nullptr != ptr) {
std::ignore = axclrtFree(ptr); // 释放内存
ptr = nullptr;
}
}
);
// 2-8. 检查输入内存是否分配成功
for (uint32_t i = 0; i < input_count; i++) {
if (nullptr == inputs.get()[i]) {
return false; // 退出程序
}
}
// 2-9. 设置输入缓冲区
for (uint32_t i = 0; i < input_count; i++) {
if (const auto ret = axclrtEngineSetInputBufferByIndex(io.get(), i, inputs.get()[i], inputs_size[i]); 0 != ret) {
fprintf(stderr, "Set input buffer{index: %d} failed{0x%08X}.\n", i, ret); // 输出设置输入缓冲区失败的信息
return false; // 退出程序
}
}
// 2-10. 获取输出数量
uint32_t output_count = 0;
if (output_count = axclrtEngineGetNumOutputs(info.get()); 0 == output_count) {
fprintf(stderr, "Get model output count failed.\n"); // 输出获取输出数量失败的信息
return false; // 退出程序
}
// 2-11. 获取输出大小
std::vector<uint32_t> outputs_size(output_count, 0);
for (uint32_t i = 0; i < output_count; i++) {
outputs_size[i] = axclrtEngineGetOutputSizeByIndex(info.get(), 0, i); // 获取每个输出的大小
}
// 2-12. 分配输出内存
auto outputs = utilities::vector_guard<void*>(
[&output_count, &outputs_size]() {
std::vector<void*> ptrs(output_count, nullptr);
for (uint32_t i = 0; i < output_count; i++) {
if (const auto ret = axclrtMalloc(&ptrs[i], outputs_size[i], axclrtMemMallocPolicy{}); 0 != ret) {
fprintf(stderr, "Memory allocation for output tensor{index: %d} failed{0x%08X}.\n", i, ret); // 输出内存分配失败的信息
}
}
return ptrs; // 返回分配的内存指针数组
},
[](void* ptr) {
if (nullptr != ptr) {
std::ignore = axclrtFree(ptr); // 释放内存
ptr = nullptr;
}
}
);
// 2-13. 检查输出内存是否分配成功
for (uint32_t i = 0; i < output_count; i++) {
if (nullptr == outputs.get()[i]) {
return false; // 退出程序
}
}
// 2-14. 设置输出缓冲区
for (uint32_t i = 0; i < output_count; i++) {
if (const auto ret = axclrtEngineSetOutputBufferByIndex(io.get(), i, outputs.get()[i], outputs_size[i]); 0 != ret) {
fprintf(stderr, "Set output buffer{index: %d} failed{0x%08X}.\n", i, ret); // 输出设置输出缓冲区失败的信息
return false; // 退出程序
}
}
// 3-0. 读取输入图像
cv::Mat src = cv::imread(image_file);
if (src.empty()) {
fprintf(stderr, "Read image failed.\n"); // 输出读取图像失败的信息
return -1; // 退出程序
}
// 3-1. 分配输入主机缓冲区
std::vector<uint8_t> input_buffer(input_size[1] * input_size[0] * 3, 0); // 分配输入缓冲区(RGB)
auto dst = cv::Mat(cv::Size(input_size[1], input_size[0]), CV_8UC3, input_buffer.data()); // 创建 OpenCV Mat 结构
// 3-2. 预处理图像(调整大小和交换 RGB 通道)
preprocess::sampler sampler(preprocess::crop_type::imagenet, preprocess::resize_type::linear, cmd.exist("swap-rb"));
sampler(src, dst); // 对输入图像进行处理
// 3-3. 将输入数据发送到设备
if (const auto ret = axclrtMemcpy(inputs.get()[0], input_buffer.data(), input_buffer.size(), AXCL_MEMCPY_HOST_TO_DEVICE); 0 != ret) {
fprintf(stderr, "Copy input data to device failed{0x%08X}.\n", ret); // 输出数据复制失败的信息
return false; // 退出程序
}
// 3-4. 执行模型推理
std::vector<float> time_costs(repeat, 0); // 记录每次推理的时间
for (int i = 0; i < repeat; ++i) {
utilities::timer tick; // 创建计时器
const auto ret = axclrtEngineExecute(m.get(), ctx, 0, io.get()); // 执行推理
time_costs[i] = tick.elapsed(); // 记录推理时间
if ( 0 != ret) {
fprintf(stderr, "Run model failed{0x%08X}.\n", ret); // 输出推理失败的信息
return false; // 退出程序
}
}
// 3-5. 获取输出结果
std::vector<float> output_buffer(outputs_size[0], 0.f); // 初始化输出缓冲区
if (const auto ret = axclrtMemcpy(output_buffer.data(), outputs.get()[0], outputs_size[0], AXCL_MEMCPY_DEVICE_TO_HOST); 0 != ret) {
fprintf(stderr, "Copy output data to host failed{0x%08X}.\n", ret); // 输出数据复制失败的信息
return false; // 退出程序
}
// 3-6. 后处理,提取检测结果
const auto topK = classification::topK(output_buffer.data(), output_buffer.size(), cmd.get<int>("topk")); // 获取 Top K 结果
for (const auto& [prob, index] : topK) {
fprintf(stdout, "%3d: %4.1f%%, %s\n", index, prob, IMAGENET_CLASSES[index]); // 输出每个类别的概率和名称
}
fprintf(stdout, "--------------------------------------\n");
return 0; // 正常结束程序
}
以 imagenet 数据集的 imagenet_cat.jpg 作为分类对象,sample 执行完了会有如下输出(注意,模型和输入图像要根据实际情况微调):

/root # /opt/bin/axcl/axcl_sample_classification -m /opt/data/npu/models/mobilenetv2.axmodel -i /opt/data/npu/images/cat.jpg
axcl initializing...
axcl inited.
Select axcl device{index: 0} as {129}.
axclrt Engine inited.
--------------------------------------
model file : /opt/data/npu/models/mobilenetv2.axmodel
image file : /opt/data/npu/images/cat.jpg
img height : 224
img width : 224
--------------------------------------
282: 9.8%, tiger cat
285: 9.8%, Egyptian cat
283: 9.5%, Persian cat
281: 9.4%, tabby, tabby cat
463: 7.5%, bucket, pail
--------------------------------------
可见菊猫 Top1 被分类为老虎猫;Top5 分类基本正确。
检测模型
检测模型的示例代码含完整注释如下:
#include "common/args.hpp" // 包含分割令行参数的头文件
#include "common/types.hpp" // 包含常用类型定义的头文件
#include "common/sampler.hpp" // 包含图像预处理的头文件
#include "common/detection.hpp" // 包含目标检测相关的数据结构和算法
#include "common/mscoco.hpp" // 包含 MS COCO 数据集的类别定义
#include "common/palette.hpp" // 包含调色板生成和颜色转换的函数
#include "utilities/timer.hpp" // 包含计时器类,用于测量时间
#include "utilities/file.hpp" // 包含文件操作的工具函数
#include "utilities/scalar_guard.hpp" // 包含资源管理类,确保资源的释放
#include "utilities/vector_guard.hpp" // 包含动态数组的资源管理类
#include <axcl.h> // AXCL API 头文件
#include <cmdline.h> // 命令行解析库
#include <opencv2/opencv.hpp> // OpenCV 图像处理库
#include <algorithm> // 包含算法函数
#include <numeric> // 包含数值计算函数
// 设置默认配置文件路径
constexpr char DEFAULT_CONFIG[] = "/usr/local/axcl/axcl.json";
// 设置默认输入图像的高度和宽度
constexpr int DEFAULT_IMG_H = 640;
constexpr int DEFAULT_IMG_W = 640;
// 设置默认的概率阈值和 IOU 阈值
constexpr float DEFAULT_PROB_THRESHOLD = 0.45f;
constexpr float DEFAULT_IOU_THRESHOLD = 0.45f;
// 设置默认循环次数
constexpr int DEFAULT_LOOP_COUNT = 1;
// 定义锚框
const std::vector<std::vector<detection::box>> anchors{
{{10, 13}, {16, 30}, {33, 23}},
{{30, 61}, {62, 45}, {59, 119}},
{{116, 90}, {156, 198}, {373, 326}}
};
// 定义模型输出头下采样的步幅
const std::vector<int> strides{8, 16, 32};
// 生成颜色调色板
std::vector<cv::Vec3b> palette = common::palette(std::size(MSCOCO_CLASSES));
// 绘制检测到的对象
static void draw_objects(const cv::Mat& bgr, const std::string& name, const std::vector<detection::object>& objects) {
// 克隆输入图像以便绘制
cv::Mat image = bgr.clone();
// 遍历检测到的每个对象
for (const auto& [rect, prob, label] : objects) {
const auto& [x, y, w, h] = rect; // 提取矩形的坐标和大小
fprintf(stdout, "%2d: %3.0f%%, [%4.0f, %4.0f, %4.0f, %4.0f], %s\n",
label, prob * 100, x, y, x + w, y + h, MSCOCO_CLASSES[label]); // 输出对象信息
const cv::Rect obj_rect{static_cast<int>(x), static_cast<int>(y), static_cast<int>(w), static_cast<int>(h)}; // 创建矩形对象
const auto& color = palette[label]; // 获取该对象的颜色
cv::rectangle(image, obj_rect, color, 2); // 在图像上绘制矩形框
char text[256];
sprintf(text, "%s %.1f%%", MSCOCO_CLASSES[label], prob * 100); // 准备显示的文本
// 计算文本位置
int baseLine = 0;
const cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_TRIPLEX, 0.5, 1, &baseLine);
int cv_x = std::max(static_cast<int>(x - 1), 0); // 确保文本不会超出图像边界
int cv_y = std::max(static_cast<int>(y + 1) - label_size.height - baseLine, 0);
if (cv_x + label_size.width > image.cols) {
cv_x = image.cols - label_size.width; // 调整文本 x 坐标
}
if (cv_y + label_size.height > image.rows) {
cv_y = image.rows - label_size.height; // 调整文本 y 坐标
}
// 绘制文本背景
const cv::Size text_background_size(label_size.width, label_size.height + baseLine);
const cv::Rect text_background(cv::Point(cv_x, cv_y), text_background_size);
cv::rectangle(image, text_background, color, -1); // 绘制填充矩形
const cv::Point text_origin(cv_x, cv_y + label_size.height); // 文本的起始位置
const auto text_color = common::get_complementary_color(color); // 获取对比色
cv::putText(image, text, text_origin, cv::FONT_HERSHEY_TRIPLEX, 0.5, text_color); // 在图像上绘制文本
}
// 将结果图像保存为文件
cv::imwrite(std::string(name) + ".jpg", image);
}
int main(int argc, char* argv[]) {
cmdline::parser cmd; // 创建命令行解析器
// 添加命令行参数
cmd.add<std::string>("config", 'c', "config file: axcl.json", false, DEFAULT_CONFIG);
cmd.add<int>("device", 'd', "device index (if multi-card available)", false, 0, cmdline::range(0, 3));
#if defined(ENV_CHIP_SERIES_MC50)
cmd.add<int>("kind", 'k', "visual npu kind", false, 0, cmdline::range(0, 3));
#endif
#if defined(ENV_CHIP_SERIES_MC20E)
cmd.add<int>("kind", 'k', "visual npu enable flag", false, 0, cmdline::range(0, 1));
#endif
cmd.add<std::string>("model", 'm', "model file(a.k.a. .axmodel)", true, ""); // 必填参数,模型文件
cmd.add<std::string>("image", 'i', "image file", true, ""); // 必填参数,图像文件
cmd.add<std::string>("size", 'g', "input_h,input_w", false, std::to_string(DEFAULT_IMG_H) + "," + std::to_string(DEFAULT_IMG_W)); // 输入图像大小
cmd.add("swap-rb", 's', "swap rgb(bgr) to bgr(rgb)"); // 可选参数,是否交换颜色通道
cmd.add<int>("repeat", 'r', "repeat count", false, DEFAULT_LOOP_COUNT, cmdline::range(1, std::numeric_limits<int>::max())); // 重复次数
cmd.parse_check(argc, argv); // 解析命令行参数并进行检查
// 0-0. 检查配置文件
if (const auto config = cmd.get<std::string>("config");
cmd.exist("config") && (!utilities::exists(config) || !utilities::is_regular_file(config))) {
fprintf(stderr, "Config file %s is not exist, please check it.\n", config.c_str()); // 输出错误信息
return -1; // 退出程序
}
// 0-1. 检查模型和图像文件是否存在
const auto model_file = cmd.get<std::string>("model");
const auto image_file = cmd.get<std::string>("image");
if (const auto model_file_flag = utilities::exists(model_file), image_file_flag = utilities::exists(image_file);
!model_file_flag | !image_file_flag) {
auto show_error = [](const std::string& kind, const std::string& value) {
fprintf(stderr, "Input file %s(%s) is not exist, please check it.\n", kind.c_str(), value.c_str());
};
if (!model_file_flag) { show_error("model", model_file); } // 输出模型文件不存在的错误
if (!image_file_flag) { show_error("image", image_file); } // 输出图像文件不存在的错误
return -1; // 退出程序
}
// 0-2. 获取输入图像大小
std::array<int, 2> input_size = {DEFAULT_IMG_H, DEFAULT_IMG_W}; {
auto input_size_string = cmd.get<std::string>("size");
if (auto input_size_flag = common::parse_args(input_size_string, input_size); !input_size_flag) {
auto show_error = [](const std::string& kind, const std::string& value) {
fprintf(stderr, "Input %s(%s) is not allowed, please check it.\n", kind.c_str(), value.c_str());
};
show_error("size", input_size_string); // 输出输入大小错误
return -1; // 退出程序
}
}
// 0-3. 获取重复次数
auto repeat = cmd.get<int>("repeat");
// 1-0. 获取设备索引
const auto device_index = static_cast<uint32_t>(cmd.get<int>("device"));
// 1-1 初始化 AXCL,使用 scalar_guard 确保资源最终释放
fprintf(stdout, "axcl initializing...\n");
auto env_guard = utilities::scalar_guard<int32_t>(
axclInit(cmd.exist("config") ? cmd.get<std::string>("config").c_str() : nullptr), // 初始化 AXCL
[](const int32_t& code) {
if (0 == code) {
std::ignore = axclFinalize(); // 确保在初始化失败时调用清理
}
}
);
// 1-2. 检查初始化结果
if (const int ret = env_guard.get(); 0 != ret) {
fprintf(stderr, "Init axcl failed{0x%08X}.\n", ret); // 输出初始化失败的信息
return false; // 退出程序
}
fprintf(stdout, "axcl inited.\n");
// 1-3. 获取设备列表
axclrtDeviceList lst;
if (const auto ret = axclrtGetDeviceList(&lst); 0 != ret || 0 == lst.num) {
fprintf(stderr,
"Get axcl device failed{0x%08X}, find total %d device.\n", ret, lst.num); // 输出获取设备失败的信息
return false; // 退出程序
}
// 1-4. 检查设备索引
if (device_index >= lst.num) {
fprintf(stderr,
"Specified device index{%u} is out of range{total %d}.\n", device_index, lst.num); // 输出设备索引超出范围的信息
return false; // 退出程序
}
// 1-5. 设置设备
if (const auto ret = axclrtSetDevice(lst.devices[device_index]); 0 != ret) {
fprintf(stderr, "Set axcl device as index{%u} failed{0x%08X}.\n", device_index, ret); // 输出设置设备失败的信息
return false; // 退出程序
}
fprintf(stdout,"Select axcl device{index: %u} as {%d}.\n", device_index, lst.devices[device_index]);
// 1-6. 初始化 NPU
const int kind = cmd.get<int>("kind"); // 获取 NPU 类型
if (const int ret = axclrtEngineInit(static_cast<axclrtEngineVNpuKind>(kind)); 0 != ret) {
fprintf(stderr, "Init axclrt Engine as kind{%s} failed{0x%08X}.\n", common::get_visual_mode_string(kind).c_str(), ret); // 输出初始化 NPU 失败的信息
return false; // 退出程序
}
fprintf(stdout, "axclrt Engine inited.\n");
// 1-7. 打印参数信息
fprintf(stdout, "--------------------------------------\n");
fprintf(stdout, "model file : %s\n", model_file.c_str());
fprintf(stdout, "image file : %s\n", image_file.c_str());
fprintf(stdout, "img height : %d\n", input_size[0]);
fprintf(stdout, "img width : %d\n", input_size[1]);
fprintf(stdout, "--------------------------------------\n");
// 2-1. 加载模型
auto m = utilities::scalar_guard<uint64_t>(
[&model_file]() {
if (uint64_t id; 0 == axclrtEngineLoadFromFile(model_file.c_str(), &id)) { // 从文件加载模型
return id; // 返回模型 ID
}
fprintf(stderr, "Create model{%s} handle failed.\n", model_file.c_str());
return uint64_t{0}; // 返回 0 表示失败
},
[](const uint64_t& id) {
if (uint64_t{0} != id) {
std::ignore = axclrtEngineUnload(id); // 卸载模型
}
}
);
// 2-2. 创建上下文
uint64_t ctx = 0;
if (const auto ret = axclrtEngineCreateContext(m.get(), &ctx); 0 != ret) {
fprintf(stderr, "Create model{%s} context failed.\n", model_file.c_str()); // 输出创建上下文失败的信息
return false; // 退出程序
}
// 2-3. 获取 IO 信息
auto info = utilities::scalar_guard<axclrtEngineIOInfo>(
[&m]() {
axclrtEngineIOInfo i;
if (0 == axclrtEngineGetIOInfo(m.get(), &i)) {
return i; // 返回 IO 信息
}
fprintf(stderr, "Get model io info failed.\n");
return axclrtEngineIOInfo{}; // 返回空结构体表示失败
},
[](const axclrtEngineIOInfo& i) {
std::ignore = axclrtEngineDestroyIOInfo(i); // 释放 IO 信息
}
);
// 2-4. 创建 IO
auto io = utilities::scalar_guard<axclrtEngineIO>(
[&info]() {
axclrtEngineIO i;
if (0 == axclrtEngineCreateIO(info.get(), &i)) {
return i; // 返回创建的 IO
}
fprintf(stderr, "Create model io failed.\n");
return axclrtEngineIO{}; // 返回空结构体表示失败
},
[](const axclrtEngineIO& i) {
std::ignore = axclrtEngineDestroyIO(i); // 释放 IO
}
);
// 2-5. 获取输入数量
uint32_t input_count = 0;
if (input_count = axclrtEngineGetNumInputs(info.get()); 0 == input_count) {
fprintf(stderr, "Get model input count failed.\n"); // 输出获取输入数量失败的信息
return false; // 退出程序
}
// 2-6. 获取输入大小
std::vector<uint32_t> inputs_size(input_count, 0);
for (uint32_t i = 0; i < input_count; i++) {
inputs_size[i] = axclrtEngineGetInputSizeByIndex(info.get(), 0, i); // 获取每个输入的大小
}
// 2-7. 分配输入内存
auto inputs = utilities::vector_guard<void*>(
[&input_count, &inputs_size]() {
std::vector<void*> ptrs(input_count, nullptr);
for (uint32_t i = 0; i < input_count; i++) {
if (const auto ret = axclrtMalloc(&ptrs[i], inputs_size[i], axclrtMemMallocPolicy{}); 0 != ret) {
fprintf(stderr, "Memory allocation for input tensor{index: %d} failed{0x%08X}.\n", i, ret); // 输出内存分配失败的信息
}
}
return ptrs; // 返回分配的内存指针数组
},
[](void* ptr) {
if (nullptr != ptr) {
std::ignore = axclrtFree(ptr); // 释放内存
ptr = nullptr;
}
}
);
// 2-8. 检查输入内存是否分配成功
for (uint32_t i = 0; i < input_count; i++) {
if (nullptr == inputs.get()[i]) {
return false; // 退出程序
}
}
// 2-9. 设置输入缓冲区
for (uint32_t i = 0; i < input_count; i++) {
if (const auto ret = axclrtEngineSetInputBufferByIndex(io.get(), i, inputs.get()[i], inputs_size[i]); 0 != ret) {
fprintf(stderr, "Set input buffer{index: %d} failed{0x%08X}.\n", i, ret); // 输出设置输入缓冲区失败的信息
return false; // 退出程序
}
}
// 2-10. 获取输出数量
uint32_t output_count = 0;
if (output_count = axclrtEngineGetNumOutputs(info.get()); 0 == output_count) {
fprintf(stderr, "Get model output count failed.\n"); // 输出获取输出数量失败的信息
return false; // 退出程序
}
// 2-11. 获取输出大小
std::vector<uint32_t> outputs_size(output_count, 0);
for (uint32_t i = 0; i < output_count; i++) {
outputs_size[i] = axclrtEngineGetOutputSizeByIndex(info.get(), 0, i); // 获取每个输出的大小
}
// 2-12. 分配输出内存
auto outputs = utilities::vector_guard<void*>(
[&output_count, &outputs_size]() {
std::vector<void*> ptrs(output_count, nullptr);
for (uint32_t i = 0; i < output_count; i++) {
if (const auto ret = axclrtMalloc(&ptrs[i], outputs_size[i], axclrtMemMallocPolicy{}); 0 != ret) {
fprintf(stderr, "Memory allocation for output tensor{index: %d} failed{0x%08X}.\n", i, ret); // 输出内存分配失败的信息
}
}
return ptrs; // 返回分配的内存指针数组
},
[](void* ptr) {
if (nullptr != ptr) {
std::ignore = axclrtFree(ptr); // 释放内存
ptr = nullptr;
}
}
);
// 2-13. 检查输出内存是否分配成功
for (uint32_t i = 0; i < output_count; i++) {
if (nullptr == outputs.get()[i]) {
return false; // 退出程序
}
}
// 2-14. 设置输出缓冲区
for (uint32_t i = 0; i < output_count; i++) {
if (const auto ret = axclrtEngineSetOutputBufferByIndex(io.get(), i, outputs.get()[i], outputs_size[i]); 0 != ret) {
fprintf(stderr, "Set output buffer{index: %d} failed{0x%08X}.\n", i, ret); // 输出设置输出缓冲区失败的信息
return false; // 退出程序
}
}
// 3-0. 读取输入图像
cv::Mat src = cv::imread(image_file);
if (src.empty()) {
fprintf(stderr, "Read image failed.\n"); // 输出读取图像失败的信息
return -1; // 退出程序
}
// 3-1. 分配输入主机缓冲区
std::vector<uint8_t> input_buffer(input_size[1] * input_size[0] * 3, 0); // 分配输入缓冲区(RGB)
auto dst = cv::Mat(cv::Size(input_size[1], input_size[0]), CV_8UC3, input_buffer.data()); // 创建 OpenCV Mat 结构
// 3-2. 预处理图像(调整大小和交换 RGB 通道)
preprocess::sampler sampler(preprocess::crop_type::letterbox, preprocess::resize_type::linear, cmd.exist("swap-rb"));
sampler(src, dst); // 对输入图像进行处理
// 3-3. 将输入数据发送到设备
if (const auto ret = axclrtMemcpy(inputs.get()[0], input_buffer.data(), input_buffer.size(), AXCL_MEMCPY_HOST_TO_DEVICE); 0 != ret) {
fprintf(stderr, "Copy input data to device failed{0x%08X}.\n", ret); // 输出数据复制失败的信息
return false; // 退出程序
}
// 3-4. 执行模型推理
std::vector<float> run_costs(repeat, 0); // 记录每次推理的时间
for (int i = 0; i < repeat; ++i) {
utilities::timer tick; // 创建计时器
const auto ret = axclrtEngineExecute(m.get(), ctx, 0, io.get()); // 执行推理
run_costs[i] = tick.elapsed(); // 记录推理时间
if ( 0 != ret) {
fprintf(stderr, "Run model failed{0x%08X}.\n", ret); // 输出推理失败的信息
return false; // 退出程序
}
}
// 3-5. 获取输出结果
std::vector<float> output_buffer(outputs_size[0], 0.f); // 初始化输出缓冲区
if (const auto ret = axclrtMemcpy(output_buffer.data(), outputs.get()[0], outputs_size[0], AXCL_MEMCPY_DEVICE_TO_HOST); 0 != ret) {
fprintf(stderr, "Copy output data to host failed{0x%08X}.\n", ret); // 输出数据复制失败的信息
return false; // 退出程序
}
// 3-6. 后处理,提取检测结果
const auto topK = classification::topK(output_buffer.data(), output_buffer.size(), cmd.get<int>("topk")); // 获取 Top K 结果
for (const auto& [prob, index] : topK) {
fprintf(stdout, "%3d: %4.1f%%, %s\n", index, prob, IMAGENET_CLASSES[index]); // 输出每个类别的概率和名称
}
fprintf(stdout, "--------------------------------------\n");
return 0; // 正常结束程序
}
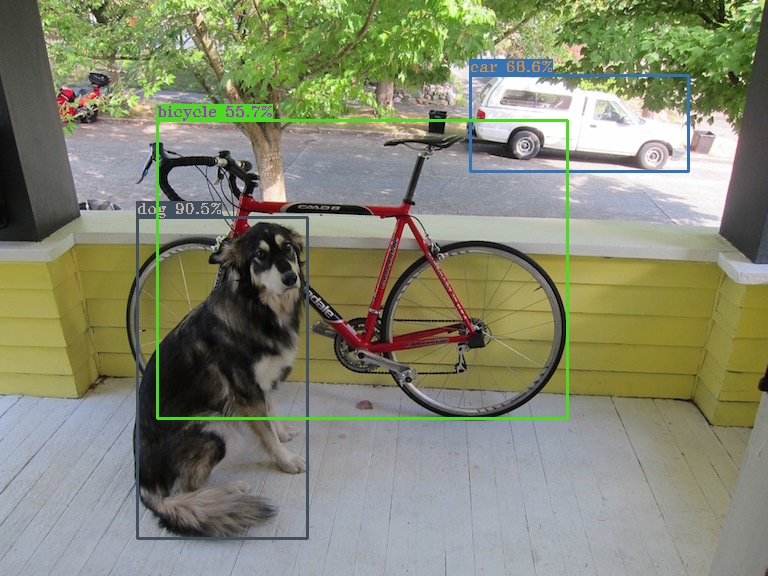
以 PASCAL VOC 数据集的 voc_dog.jpg 作为检测对象,sample 执行完了会有如下输出(注意,模型和输入图像要根据实际情况微调):

/root # /opt/bin/axcl/axcl_sample_yolov5s -m yolov5s.axmodel -i voc_dog.jpg
axcl initializing...
axcl inited.
Select axcl device{index: 0} as {129}.
axclrt Engine inited.
--------------------------------------
model file : /opt/data/npu/models/yolov5s.axmodel
image file : /opt/data/npu/images/dog.jpg
img height : 640
img width : 640
--------------------------------------
post process cost time:1.86 ms
--------------------------------------
Repeat 1 times, avg time 8.02 ms, max_time 8.02 ms, min_time 8.02 ms
--------------------------------------
16: 91%, [ 138, 218, 310, 541], dog
2: 69%, [ 470, 76, 690, 173], car
1: 56%, [ 158, 120, 569, 420], bicycle
可见检测到了 3 个目标,并且给出了类别 ID、置信度和坐标。在 sample 执行的目录下,会保存一个名为 yolov5s_out.jpg 的检测结果,可以图片浏览器打开预览一下输出结果。
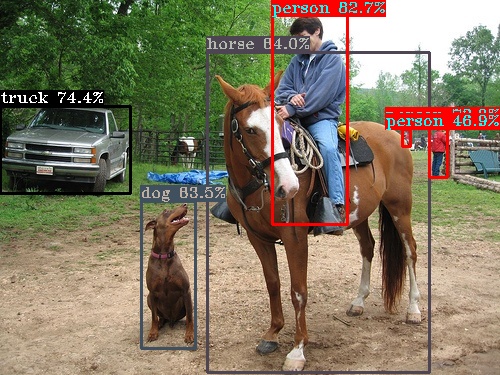
以 PASCAL VOC 数据集的 voc_horse.jpg 作为检测对象,sample 执行完了会有如下输出(注意,模型和输入图像要根据实际情况微调):

/root # /opt/bin/axcl/axcl_sample_yolov5s -m yolov5s.axmodel -i voc_horse.jpg
axcl initializing...
axcl inited.
Select axcl device{index: 0} as {129}.
axclrt Engine inited.
--------------------------------------
model file : /opt/data/npu/models/yolov5s.axmodel
image file : voc_horse.jpg
img height : 640
img width : 640
--------------------------------------
post process cost time:1.80 ms
--------------------------------------
Repeat 1 times, avg time 8.02 ms, max_time 8.02 ms, min_time 8.02 ms
--------------------------------------
17: 84%, [ 208, 52, 431, 374], horse
16: 84%, [ 142, 201, 197, 350], dog
0: 83%, [ 273, 16, 350, 226], person
7: 74%, [ 0, 107, 132, 195], truck
0: 73%, [ 430, 123, 449, 179], person
0: 47%, [ 402, 130, 412, 148], person
可见检测到了 6 个目标,并且给出了类别 ID、置信度和坐标。在 sample 执行的目录下,会保存一个名为 yolov5s_out.jpg 的检测结果,可以图片浏览器打开预览一下输出结果。